https://drive.google.com/file/d/12K9m1eAYXTqJPLfYpUuGDp9REB6UPrMt/view?usp=drivesdk
Monday, May 28, 2018
Sunday, February 4, 2018























Sunday, January 28, 2018
Civil Engineer's Hub Solan
* For New Registration contact -
* 7807449128 * 7018625989
Highway Cross Sectional Elements
Cross-Sectional Elements
The features of the cross-section of the pavement influence the life of the pavement as well as the riding comfort and safety. Of these, pavement surface characteristics affect both of these. Camber, kerbs, and geometry of various cross-sectional elements are important aspects to be considered in this regard.
Pavement Surface Characteristics
- Friction - It affects the acceleration and deceleration ability of vehicles. Lack of adequate friction can cause skidding or slipping of vehicles.
- Skidding happens when the path travelled along the road surface is more than the circumferential movement
of the wheels due to friction. - Slip occurs when the wheel revolves more than the corresponding longitudinal movement along the road.
- Skidding happens when the path travelled along the road surface is more than the circumferential movement
The choice of the value of f is a very complicated issue since it depends on many variables. IRC suggests the coefficient of longitudinal friction as 0.35-0.4 depending on the speed and coefficient of lateral friction as 0.15. The former is useful in sight distance calculation and the latter in horizontal curve design
- Unevenness
It is always desirable to have an even surface, but it is seldom possible to have such a one. Even if a road is constructed with high quality pavers, it is possible to develop unevenness due to pavement failures. Unevenness affect the vehicle operating cost, speed, riding comfort, safety, fuel consumption and wear and tear of tyres.
An unevenness index value less than 1500 mm/km is considered as good, a value less than 2500 mm.km is satisfactory up to speed of 100 kmph and values greater than 3200 mm/km is considered as uncomfortable even for 55 kmph.
- Light reflection
White roads have good visibility at night, but caused glare during day time.
• Black roads has no glare during day, but has poor visibility at night
• Concrete roads has better visibility and less glare
It is necessary that the road surface should be visible at night and reflection of light is the factor that answers
it.
it.
- Drainage
The pavement surface should be absolutely impermeable to prevent seepage of water into the pavement layers. Further, both the geometry and texture of pavement surface should help in draining out the water from the surface in less time.
Camber
Camber or cant is the cross slope provided to raise middle of the road surface in the transverse direction to drain off rainwater from road surface. The objectives of providing camber are:
• Surface protection especially for gravel and bituminous roads
• Sub-grade protection by proper drainage
• Quick drying of pavement which in turn increases safety
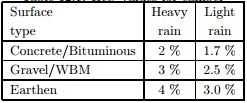
Too steep slope is undesirable for it will erode the surface. Camber is measured in 1 in n or n% (Eg. 1 in 50 or 2%) and the value depends on the type of pavement surface.
Values suggested by IRC for various categories of pavement is given in Table
- For Camber
The common types of camber are parabolic, straight, or combination of them
Width of carriage way
Width of the carriage way or the width of the pavement depends on the width of the traffic lane and number of lanes. Width of a traffic lane depends on the width of the vehicle and the clearance. Side clearance improves operating speed and safety. The maximum permissible width of a vehicle is 2.44 and the desirable side clearance for single lane traffic is 0.68 m. This
This require minimum of lane width of 3.75 m for a single lane road. However, the side clearance required is about 0.53 m, on either side and 1.06 m in the center. Therefore, a
two lane road require minimum of 3.5 meter for each lane (Figure 12:2b).
two lane road require minimum of 3.5 meter for each lane (Figure 12:2b).

Kerbs
Kerbs indicate the boundary between the carriage way and the shoulder or islands or footpaths. Different types
of kerbs are:
• Low or mountable kerbs : This type of kerbs are provided such that they encourage the traffic to remain in the through traffic lanes and also allow the driver to enter the shoulder area with little difficulty. The height of this kerb is about 10 cm above the pavement edge with a slope which allows the vehicle to climb easily. This is usually provided at medians and channelization schemes and also helps in longitudinal drainage.
• Semi-barrier type kerbs : When the pedestrian traffic is high, these kerbs are provided. Their height is 15 cm above the pavement edge. This type of kerb prevents encroachment of parking vehicles, but at acute emergency it is possible to drive over this kerb with some difficulty.
• Barrier type kerbs : They are designed to discourage vehicles from leaving the pavement. They are provided when there is considerable amount of pedestrian traffic. They are placed at a height of 20 cm above the pavement edge with a steep batter.
of kerbs are:
• Low or mountable kerbs : This type of kerbs are provided such that they encourage the traffic to remain in the through traffic lanes and also allow the driver to enter the shoulder area with little difficulty. The height of this kerb is about 10 cm above the pavement edge with a slope which allows the vehicle to climb easily. This is usually provided at medians and channelization schemes and also helps in longitudinal drainage.
• Semi-barrier type kerbs : When the pedestrian traffic is high, these kerbs are provided. Their height is 15 cm above the pavement edge. This type of kerb prevents encroachment of parking vehicles, but at acute emergency it is possible to drive over this kerb with some difficulty.
• Barrier type kerbs : They are designed to discourage vehicles from leaving the pavement. They are provided when there is considerable amount of pedestrian traffic. They are placed at a height of 20 cm above the pavement edge with a steep batter.
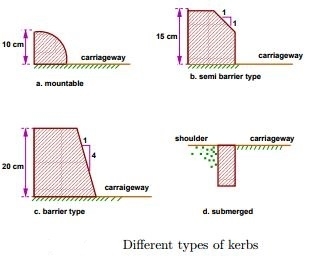
- Submerged kerbs : They are used in rural roads. The kerbs are provided at pavement edges between the pavement edge and shoulders. They provide lateral confinement and stability to the pavement.
Road margins
The portion of the road beyond the carriageway and on the roadway can be generally called road margin. Various elements that form the road margins are given below:
- Shoulders
Shoulders are provided along the road edge and is intended for accommodation of stopped vehicles, serve as an emergency lane for vehicles and provide lateral support for base and surface courses.
The shoulder width should be adequate for giving working space around a stopped vehicle. It is desirable to have a width of 4.6 m for the shoulders. A minimum width of 2.5 m is recommended for 2-lane rural highways in India.
- Parking lanes
Parking lanes are provided in urban lanes for side parking. Parallel parking is preferred because it is safe for the vehicles moving on the road. The parking lane should have a minimum of 3.0 m width in the case of parallel parking.
- Bus-bays
They should be at least 75 meters away from the intersection so that the traffic near the intersections is not affected by the bus-bay.
- Service roads
These roads are provided to avoid congestion in the expressways and also the speed of the traffic in those lanes is not reduced.
- Footpath
Footpaths are exclusive right of way to pedestrians, especially in urban areas. They are provided for the safety of the pedestrians when both the pedestrian traffic and vehicular traffic is high. Minimum width is 1.5 meter and may be increased based on the traffic.
- Guard rails
Guard stones painted in alternate black and white are usually used. They also give better visibility of curves at night under headlights of vehicles.
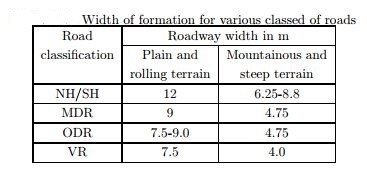
Width of formation
Width of formation or roadway width is the sum of the widths of pavements or carriage way including separators and shoulders. This does not include the extra land in formation/cutting.
Right of way
Right of way (ROW) or land width is the width of land acquired for the road, along its alignment. It should be adequate to accommodate all the cross-sectional elements of the highway and may reasonably provide for future development.
Building line represents a line on either side of the road, between which and the road no building activity is permitted at all. The right of way width is governed by:
Width of formation: It depends on the category of the highway and width of roadway and road margins.
• Height of embankment or depth of cutting: It is governed by the topography and the vertical alignment.
• Side slopes of embankment or cutting: It depends on the height of the slope, soil type etc.
• Drainage system and their size which depends on rainfall, topography etc.
• Sight distance considerations : On curves etc. there is restriction to the visibility on the inner side of the curve due to the presence of some obstructions like building structures etc.
• Reserve land for future widening: Some land has to be acquired in advance anticipating future developments like widening of the road.


Civil Engineer's Hub Solan
Highway Geometrical Desgin
Sight Distances
Stopping Sight Distance (SSD)
The minimum sight distance available in a highway at any spot should be of sufficient length to stop a vehicle traveling as design speed, safely without collision with any other obstruction. The absolute minimum sight distance is therefore equal to the stopping sight distance, which is also some times called non-passing sight distance.
The stopping distance of a vehicle is the sum of:
1. The distance travelled by the vehicle during the total reaction time known as lag distance and
2. The distance travelled by the vehicle after the application of the brakes, to a dead stop position which is known as the braking distance.
(i) lag distance = 0.278 Vt
Where, V = Speed in km/hr.
t = Reaction time in sec
(ii) Breaking distance 
f = Coefficient of friction
= 0.40 for v = 20 to 30 km/hr
= 0.35 for v = 100 km/hr
(iii) SSD = lag distance + breaking distance
Where, S% is gradient + ve sign for ascending gradient & -ve sign for descending gradient
SSD = Stopping sight distance in ‘m’.
Overtaking Sight Distance (OSD)
The minimum distance open to the vision of the driver of a vehicle intending to overtake slow vehicle ahead with safety against the traffic of opposite direction is known as the minimum overtaking sight distance (OSD) or the safe passing sight distance available

OSD = d1+d2+d3
Where, O.S.D = Overtaking sight distance in ‘m’
d = Distance travelled by overtaking vehicle A during the reaction time t sec of the driver from position A1 to A2.
d1 = 0.278 Vbt
d2 = Distance travelled by the vehicle A from A2 to A3 during the actual overtaking operation in time T sec.

where S = Minimum spacing between two vehicle.
s=0.2Vb+6 here Vb is in km/hr.
 where, a = acceleration in m/s2.
where, a = acceleration in m/s2. where a is in km/hr/sec.
where a is in km/hr/sec.
d3=0.278VCT
Where, d3 = Distance travelled by on coming vehicle C from C1 to C2 during the overtaking operation of A i.e., T sec.
VC = V = Speed of overtaking vehicle or design speed (km/hr)
If Vb is not given then
Vb = (V-16)km/hr
Vb = (V-4.5)m/s
v = design speed in m/s.
Overtaking Zone
It is desirable to construct highways in such a way that the length of road visible ahead at every point is sufficient for safe overtaking. This is seldom practicable and there may be stretches where the safe overtaking distance cannot be provided. In such zones where overtaking or passing is not safe or is not possible, sign posts should be installed indicating “No passing” or “Overtaking Prohibited” before such restricted zones starts. But the overtaking opportunity for vehicles moving at design speed should be given at frequency intervals. These zones which are meant for overtaking are called overtaking zones.
O.S.D. = d1+d2
For one way traffic
O.S.D. = d1+d2+d3
For two way traffic

Minimum length of overtaking zone = 3. (OSD)
Desirable overtaking zone = 5 (OSD)
Super Elevation (e)
In order to counteract the effect of centrifugal force and to reduce the tendency of the vehicle to overturn or skid, the outer edge of the pavement is raised with respect to the inner edge, thus providing a transverse slope throughout the length of the horizontal curve. This transverse inclination to the pavement surface is known as super elevation or cant or banking.
The superelevation ‘e’ is expressed as the ratio of the height of outer edge with respect to the horizontal width.


Where V = Speed in km/hr
R = Radius in ‘m’
F = Design value of lateral friction = 0.15
e = Rate of super elevation ∼tanθ
- Maximum Super Elevation (emax)

Ruling Minimum Radius of the Curve (Rruling)

Where, V = Ruling design speed in km/hr
e = Rate of super elevation
f = Coefficient of friction ∼0.15
Extra Widening (EW)
The extra widening of pavement on horizontal curves is divided into two parts (i) Mechanical and (ii) Psychological widening.

Mechanical Widening (Wm): The widening required to account for the off-tracking due to the rigidity of wheel base is called mechanical widening. (Wm).

Psychological widening (Wp): Extra width of pavement is also provided for psychological reasons such as, to provide for greater maneuverability or steering at higher speeds, to allow for the extra space requirements for the overhangs of vehicles and to provide greater clearance for crossing and overtaking vehicles on the curves. Psychological widening is therefore important in pavements with more than one lane.

Where, n = number of traffic lanes
l = length of wheel base (m)
R = radius of the curve (m)
V = velocity (kmph)
Transition Curve
The Indian Roads Congress recommends the use of the spiral as transition curve in the horizontal alignment of highways due to the following reasons:
The spiral curve satisfies the requirements of an ideal transition.
The geometric property of spiral is such that the calculations and setting out the curve in the field is simple and easy.
- Length of Transition Curve (L)
(i) According to rate of change of centrifugal acceleration

Where, V = Speed of vehicle in (km/hr)
C = Allowable rate of change of centrifugal acceleration in m/sec3

R = Radius of curve in ‘m’.
L = Length of transition curve in ‘m’.
(ii) According to rate of change of super elevation

Where, x = Raise of outer line of road.
X = (w + Ew)e it pavement is rotated about inner side.


(iii) According to empirical formula

Set Back Distance (m)
The clearance distance or set back distance required from the centre line of a horizontal curve to an obstruction on the inner side of the curve to provide adequate sight distance depends upon the following factors:
(i) Required sight distance (SSD)
(ii) Radius of horizontal curve, (R)
(iii) Length of the curve (Lc)
1. For single lane road
(a) when LC > SSD
Where, LC = Length of curve & s = SSD

(b) When LC < SSD


2. For two lane road
(a) when LC > SSD


(b) when LC < SSD


- Grade Compensation
Grade compensation 
Maximum value of grade compensation 
Where, R = Radius of curve in meter.
Vertical Curve
Due to changes in grade in the vertical alignment of highway, it is necessary to introduce vertical curve at the intersections of different grades to smoothen out the vertical profile and thus ease off the changes in gradients for the fast moving vehicles.
The vertical curves used in highway may be classified into two categories:
(i) Summit curves or crest curves with convexity upwards
(ii) Valley or sag curves with concavity upwards.
- Summit Curves (Crest Curve with Convexity Upward): Summit curves with convexity upwards are formed in any one of the case illustrated in fig. The deviation angles between the two interacting gradients is equal to the algebraic difference between them. Of all the cases, the deviation angle will be maximum then an ascending gradient meets with a descending gradient i.e., N = n1 – (-n2) = (n1 + n2)
(i) Length of summit curve for SSD
(a) when L > SSD



Where, L = Length of summit curve in meter
S = SSD (m)
N = Deviation angle
= Algebraic difference of grade
H = Height of eye level of driver above road way surface = 1.2 m
h = Height of subject above the pavement surface = 0.15 m
(b) When L < SSD

(ii) Length of summit curve for safe overtaking sight distance (OSD) or intermediate sight distance (ISD)
(a) When L > OSD

Where, S0 = Overtaking or Intermediate sight distance
(b) When L < OSD

- Valley Curves (Sag Curve with Concavity Upward): Valley curves or sag curves are formed in any one of the cases illustrated in fig. In all the cases the maximum possible deviation angle is obtained when a descending gradient meets with an ascending gradient.


(i) Length of valley curve as per comfort condition (transition curves are provided back to back).

(ii) Length of valley curve for head light sight distance (parabolic curve is provided).
(a) When L > SSD

Where,
L = Total length of valley curve
S = SSD (m)
N = Deviation angle
α = Beam angle ∼ 1°
h1 = Avg. height of head light = 0.75 m
(b) When L < SSD

Subscribe to:
Comments (Atom)